
The EUROPEAN NEW CAR ASSESSMENT PROGRAMME (NCAP) publishes test procedures, for example to evaluate ADAS systems such as emergency braking systems in vehicles and thus make them comparable.
The test scenarios describe typical (potentially) dangerous situations with other vehicles, pedestrians or cyclists. Examples for these tests are the approach to a vehicle in front (Car-to-Car Rear moving (CCRm), Car-to-Car Rear braking (CCRb)), an intersecting pedestrian or cyclist in a collision at different positions at the front of the vehicle without any intervention of the driver or the vehicle (e.g. Car-to-Pedestrian Nearside Adult 75% (CPNA-75), Car-to-Bicyclist Farside Adult 50% (CBFA-50)). All tests are run at different speeds and different lateral offsets. The evaluation is based on the avoidance of collision or the reduced speed during collision. Several hundred test cases result from the combinatorics of NCAP test scenarios, speeds and offset.
In order to be able to test the emergency braking system and its algorithms in the simulation, the test can be carried out independently of the sensors. For the software, the required sensor data are provided. In addition, it must be decided whether the delay specifications of the software are actually implemented in the simulation (closed loop) or not (open loop). If the simulation includes braking, the speed at collision can be measured directly. If not, the time until collision can provide information about whether braking is done in time, since the collision speed can be easily calculated from this, assuming a uniform deceleration.
For the various tests, the own ego-vehicle must be accelerated to different speeds. In TPT, this is done most easily by means of a separate parallel automaton that controls the ego-vehicle. The ego-vehicle is first accelerated to the desired speed. Parallel to this (in another automaton) the (target) object is controlled independently from the ego-vehicle. Position and all other object properties are initialized. When the desired initial situation is reached (e.g. speed of the ego-vehicle is reached or held for a time) the movement of the object is started and calculated as specified in the respective NCAP scenario. The start time is derived from the equations of motion of the ego and the object. A third parallel automaton calculates the relative speeds and sensor data of radar, lidar or camera from absolute positions and speeds. If a closed-loop simulation is selected, i.e. the vehicle implements the desired deceleration, this must be taken into account in the ego-vehicle for acceleration or speed.
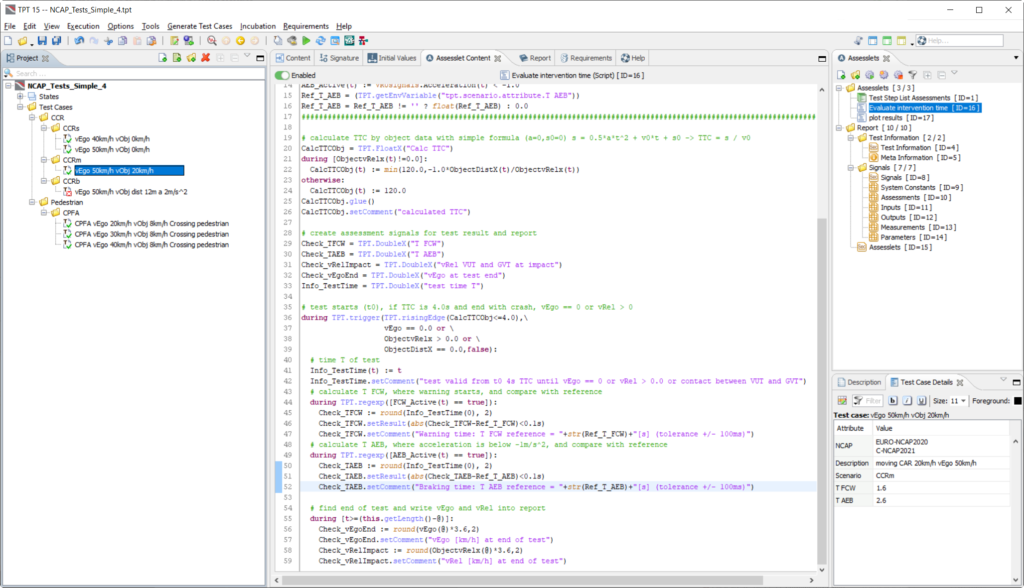
To evaluate the test results, the times of acoustic warning and braking are calculated in a TPT assessment script. This analysis works in open and closed loop operation. The minimum times are defined for different speeds and can be compared and evaluated with the achieved values. The evaluation of the relative speed at the time of the collision can only be calculated in closed-loop mode.
With this very simple form of testing, tests for emergency braking systems can be implemented very easily and efficiently without any further simulation environment, which allows an evaluation of the NCAP tests. If you would like more information on this topic, please call or send an email to info@piketec.com.